JSR's manipulazio robotiko prozesuen automatizazioarekin YASKAWA manipulazio robota plastikozko partikulen poltsen manipulazioan eta desegitean aplikatzen da, bere amanipulazio-eragiketa zehatza, fidagarria eta iraunkorra, ekoizpenaren automatizazioa sustatzeko balioa ematen duena.
Makineria, nekazaritza, arropa, eraikuntza edo eguneroko bizitzako alderdietan berdin dio, birziklatutako plastiko partikulen figura ikus dezakegu. Enbalatu ondoren, partikula hauek eskuz maneiatu behar dira, hau da, kostu handiko eta lan intentsitate handiko lana etengabekoa. Bezeroaren aurreko lanaldia 8 ordukoa zen, eta material poltsa bakoitzak 25Kg-koa zen. Eskuzko eraginkortasuna minutuko 2 poltsa da, eta 960 poltsa desmunta daitezke egunean. Robotak manipulatu eta desmuntatu ondoren lan-denbora 24 ordukoa da, etengabe funtzionatu daitekeena, eta eraginkortasuna 3 poltsa minutuko da, eta 4320 poltsa desmuntatu daitezke egunean.
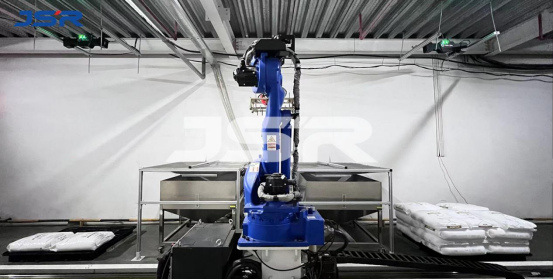
Jieshek inplementatutako irtenbideakeus bezeroentzat: Yaskawa manipulatzeko robota GP180, 7,5 m-ko luzera duen lurreko erraila, material-ontzia, material-euskarria, GP180 karga maximoa 180 kg, besoaren gehienezko zabalera 2702 mm. Lurraren orbitaren 7,5 m-ko bidaia eraginkorra 6 m da, mugitzeko abiadura 0,7 m/s-koa da. 3D ikusizko identifikazioa zuritzeko sistema. 3D ikusizko identifikazioa hutsik egiteko sistema, ikaskuntza funtzioa duen kamera, materialaren datuen eskurapen goiztiarraren bidez eta geroago materialaren modelizazioaren bidez, kameraren aitorpenaren arrakasta-tasa % 99,9koa izan dadin.
Ekoizpen automatikoak asko hobetzen ditu lanaren eraginkortasuna, ekoizpen-ahalmen egonkorra, entrega zehatza, segurtasun handia, lehendik dagoen eremuaren erabilera zentzuzkoa, irudi korporatiboa eta tailerren garbitasuna hobetzen ditu, tripulaziorik gabeko ekoizpena lortzeko.
Argitalpenaren ordua: 2022-09-26
